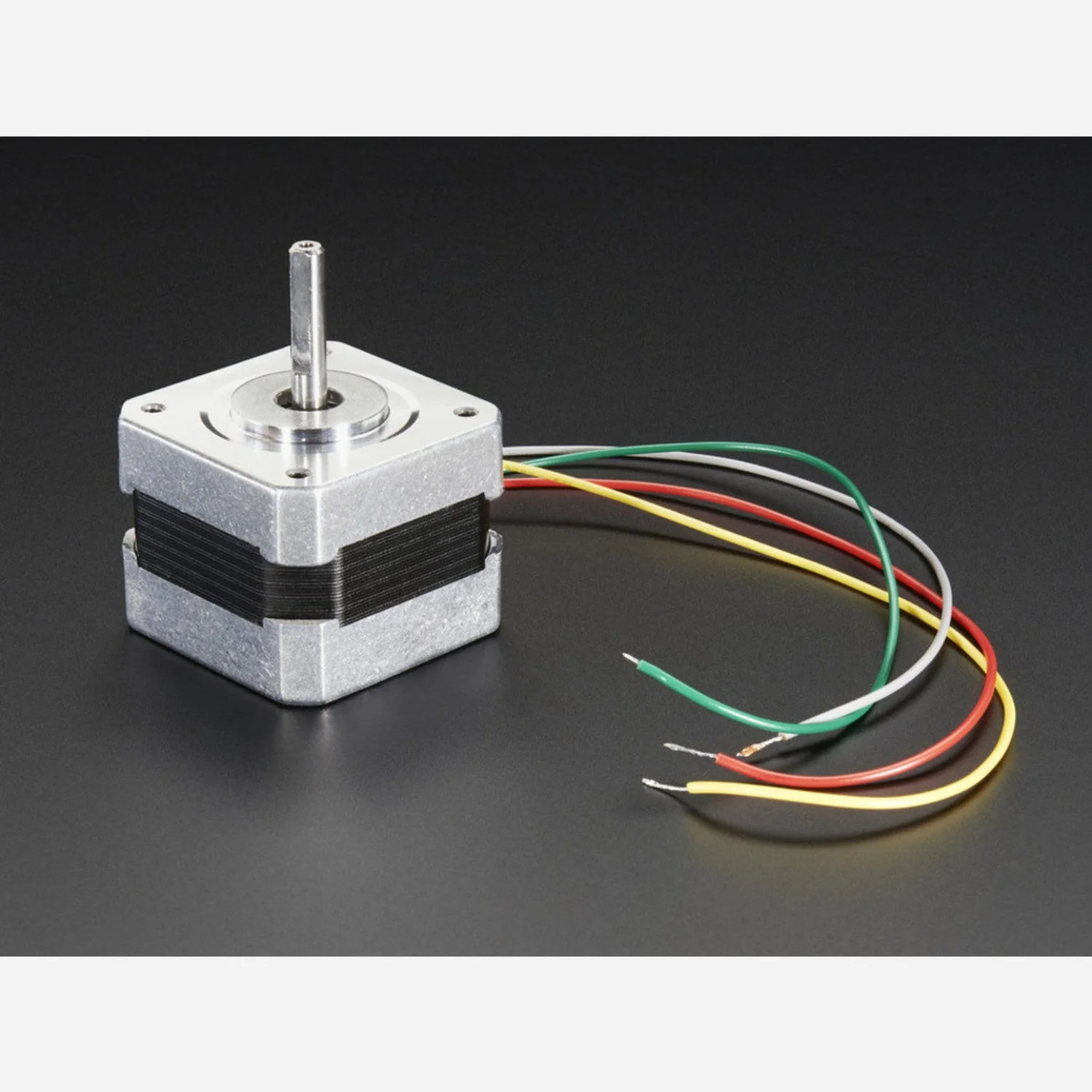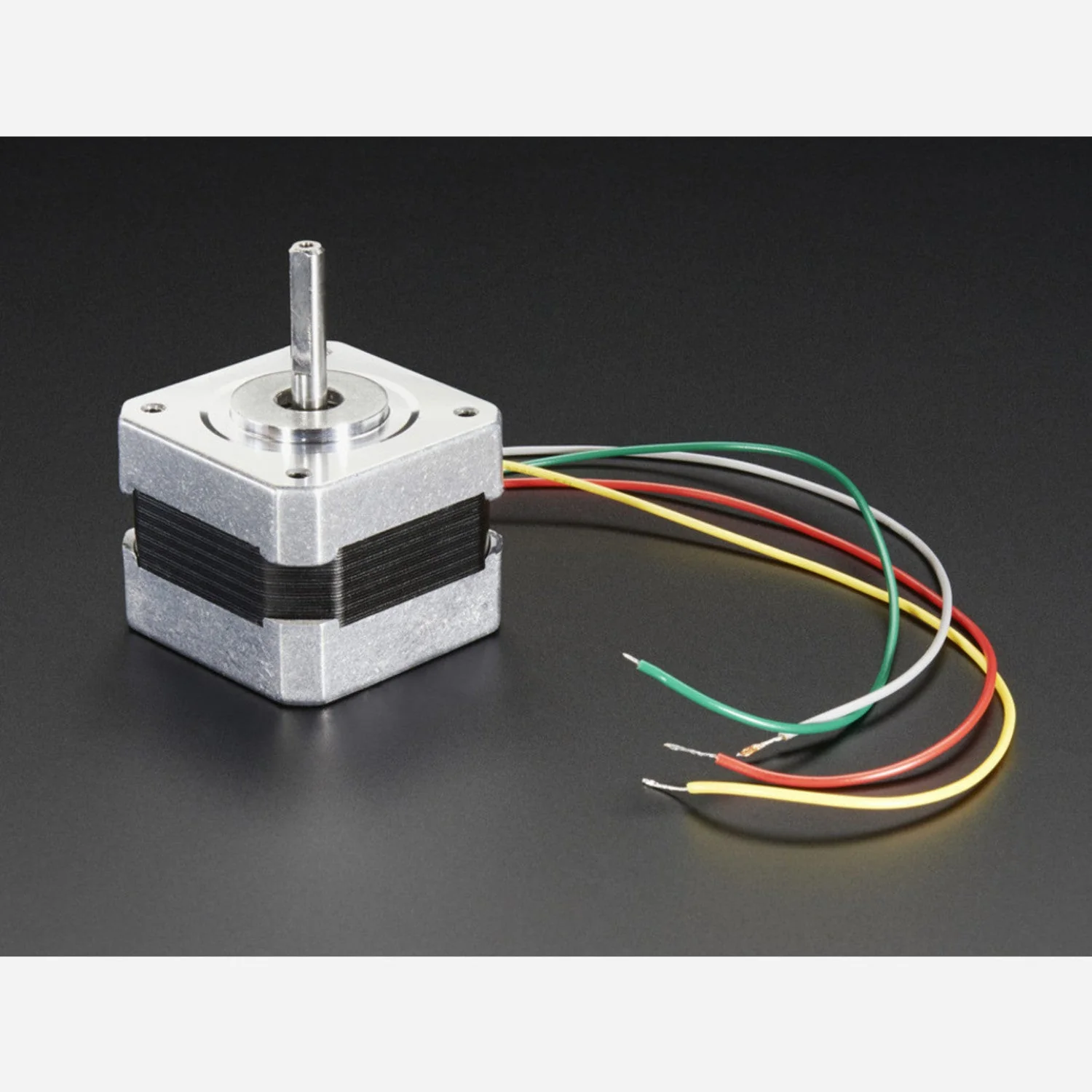
Geared DC Motor with Magnetic Encoder Outputs - 7 VDC 1:20 Ratio
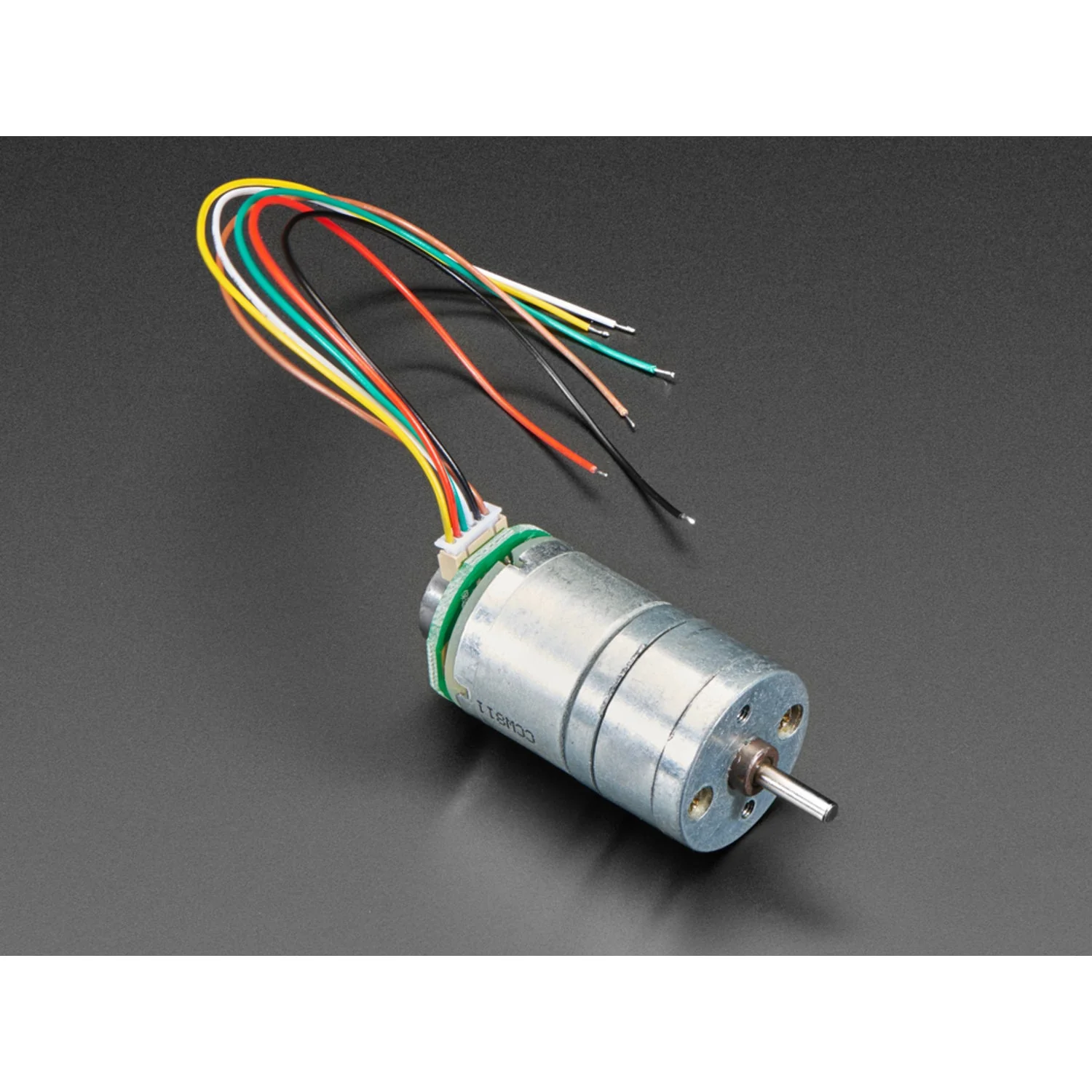
This geared DC motor comes with a built-in magnetic encoder — a magnetic wheel and two Hall effect sensors are already attached to the motor body, giving you quadrature feedback for both speed and direction without any extra wiring or mounting. It's the ideal starting point for closed-loop motor control in robotics projects.
Drive it at 7VDC via your motor driver, use PWM for speed and an H-bridge for direction control, and read encoder feedback directly into your microcontroller's interrupt pins to track RPM and rotation direction.
Specifications
- Supply Voltage – 7VDC nominal (motor)
- Gear Ratio – 1:20
- Encoder Type – Magnetic (quadrature), 2× Hall effect sensors
- Encoder Resolution – 12 counts per motor revolution
- Encoder Supply – 3–5VDC
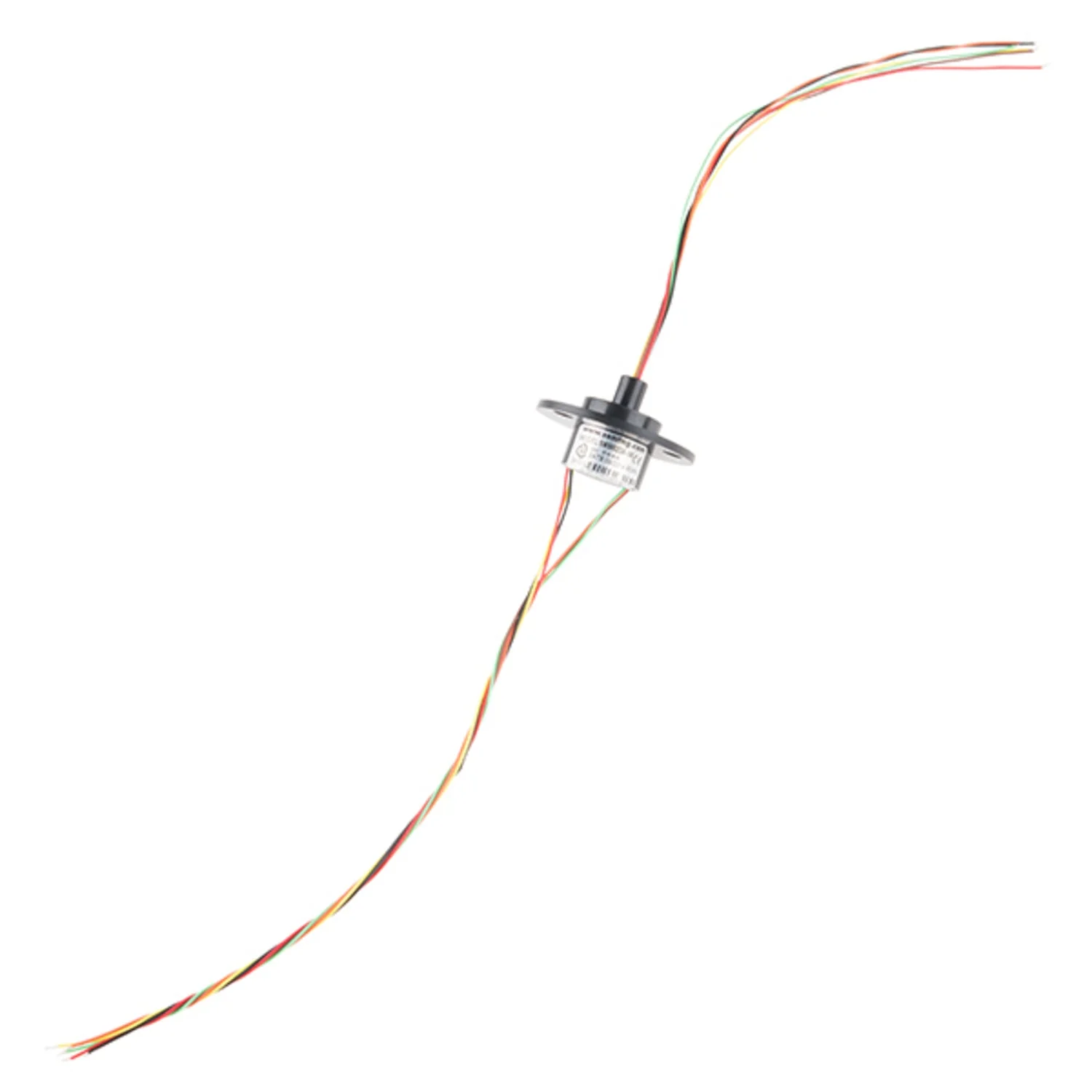
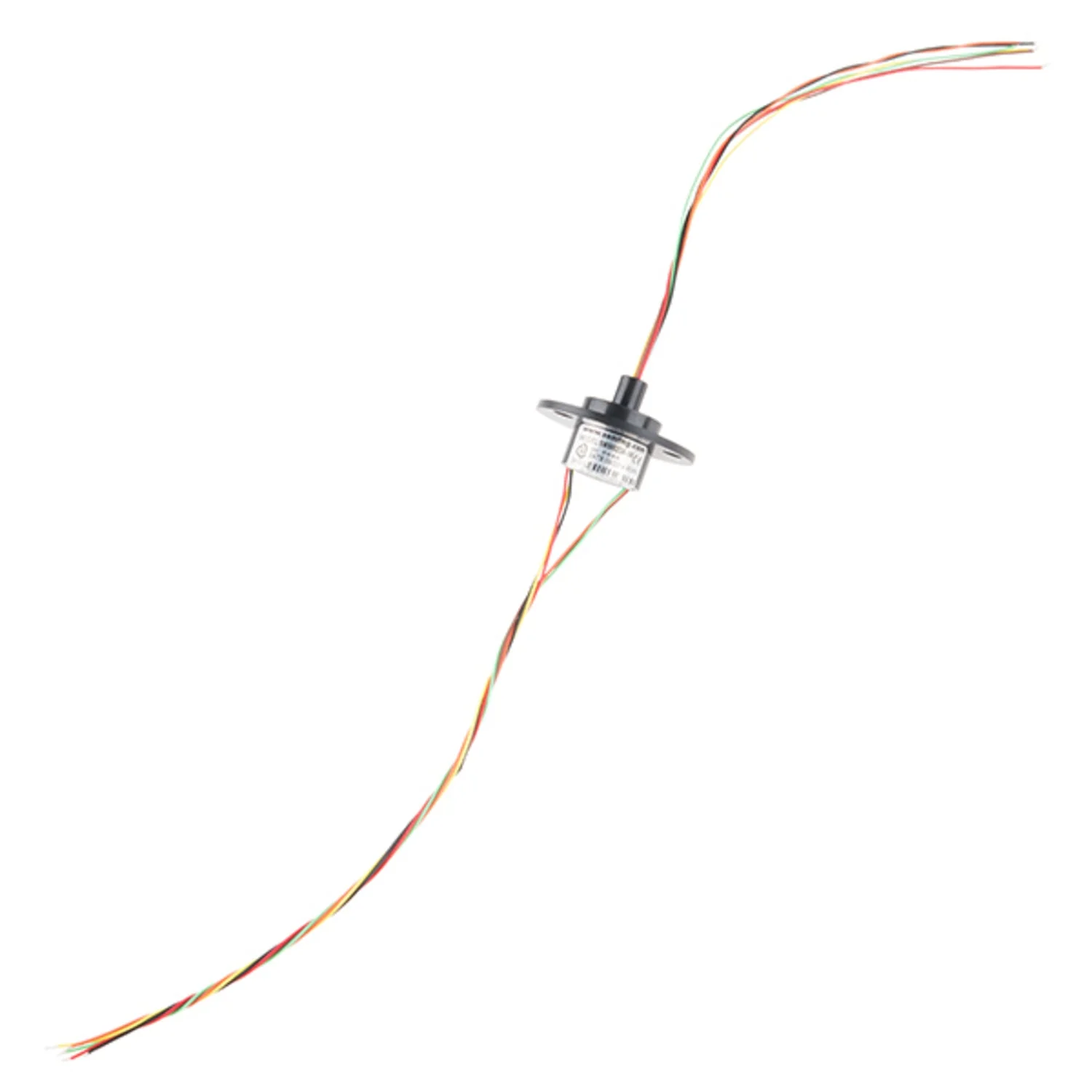
Wiring
- Brown + Yellow – Motor leads (connect to motor driver; PWM-able)
- Black – Encoder GND (connect to microcontroller ground)
- Red – Encoder power (3–5VDC)
- White + Green – Hall effect encoder outputs (connect to interrupt pins)
Ideal For
- Robotics projects requiring closed-loop speed and direction control
- Wheel odometry for differential drive robots
- Arduino and microcontroller motor control experiments
Resources
Original: $26.33
-70%$26.33
$7.90Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
This geared DC motor comes with a built-in magnetic encoder — a magnetic wheel and two Hall effect sensors are already attached to the motor body, giving you quadrature feedback for both speed and direction without any extra wiring or mounting. It's the ideal starting point for closed-loop motor control in robotics projects.
Drive it at 7VDC via your motor driver, use PWM for speed and an H-bridge for direction control, and read encoder feedback directly into your microcontroller's interrupt pins to track RPM and rotation direction.
Specifications
- Supply Voltage – 7VDC nominal (motor)
- Gear Ratio – 1:20
- Encoder Type – Magnetic (quadrature), 2× Hall effect sensors
- Encoder Resolution – 12 counts per motor revolution
- Encoder Supply – 3–5VDC
Wiring
- Brown + Yellow – Motor leads (connect to motor driver; PWM-able)
- Black – Encoder GND (connect to microcontroller ground)
- Red – Encoder power (3–5VDC)
- White + Green – Hall effect encoder outputs (connect to interrupt pins)
Ideal For
- Robotics projects requiring closed-loop speed and direction control
- Wheel odometry for differential drive robots
- Arduino and microcontroller motor control experiments