Metal Gearmotor with Encoder - 12V (9.7:1)
This 12V brushed DC gearmotor features a 9.68:1 metal spur gearbox and an integrated 48 CPR quadrature encoder on the motor shaft, providing 464.64 counts per revolution of the gearbox output. The two-channel Hall effect encoder senses a magnetic disk on the motor shaft, delivering speed and direction feedback for precise closed-loop control.
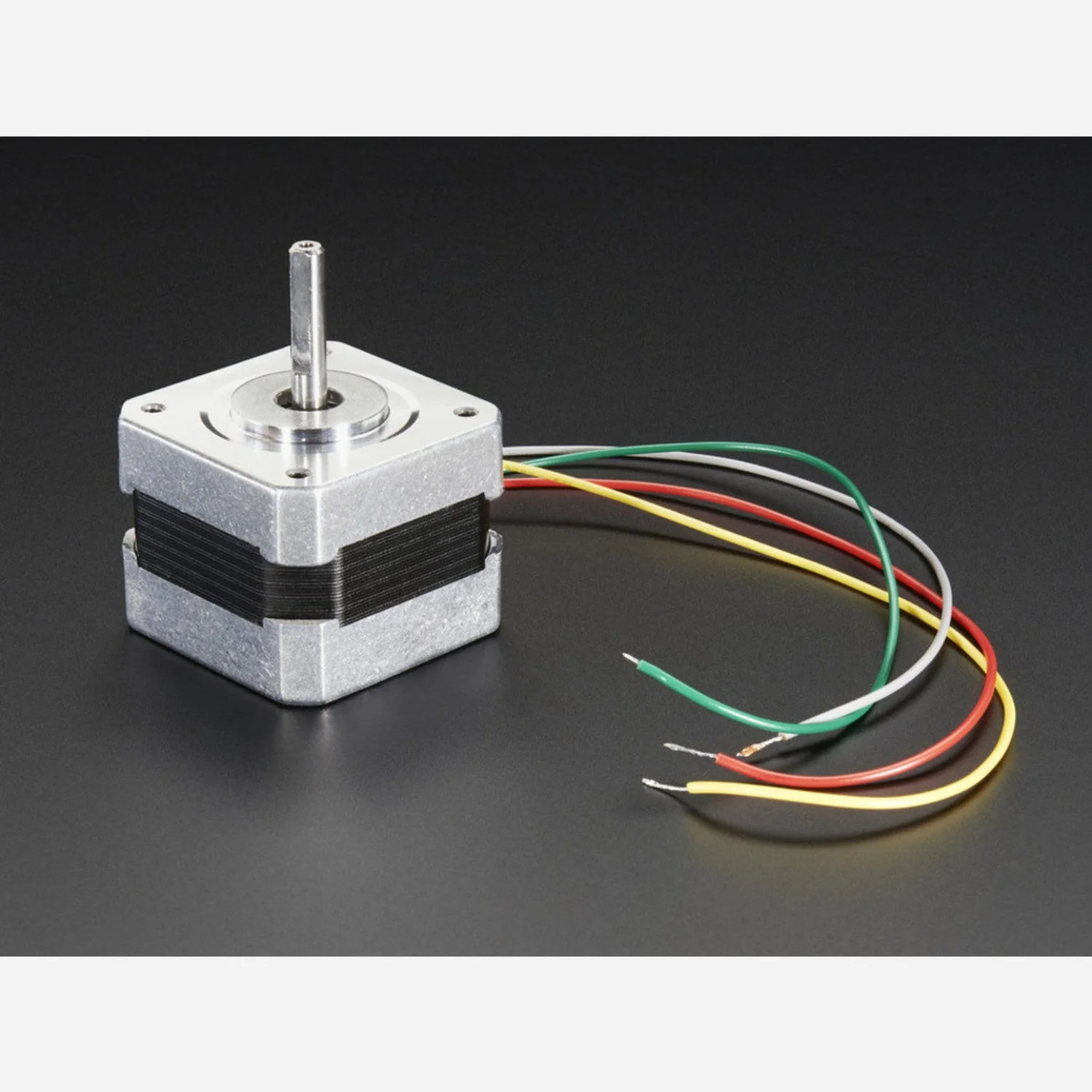
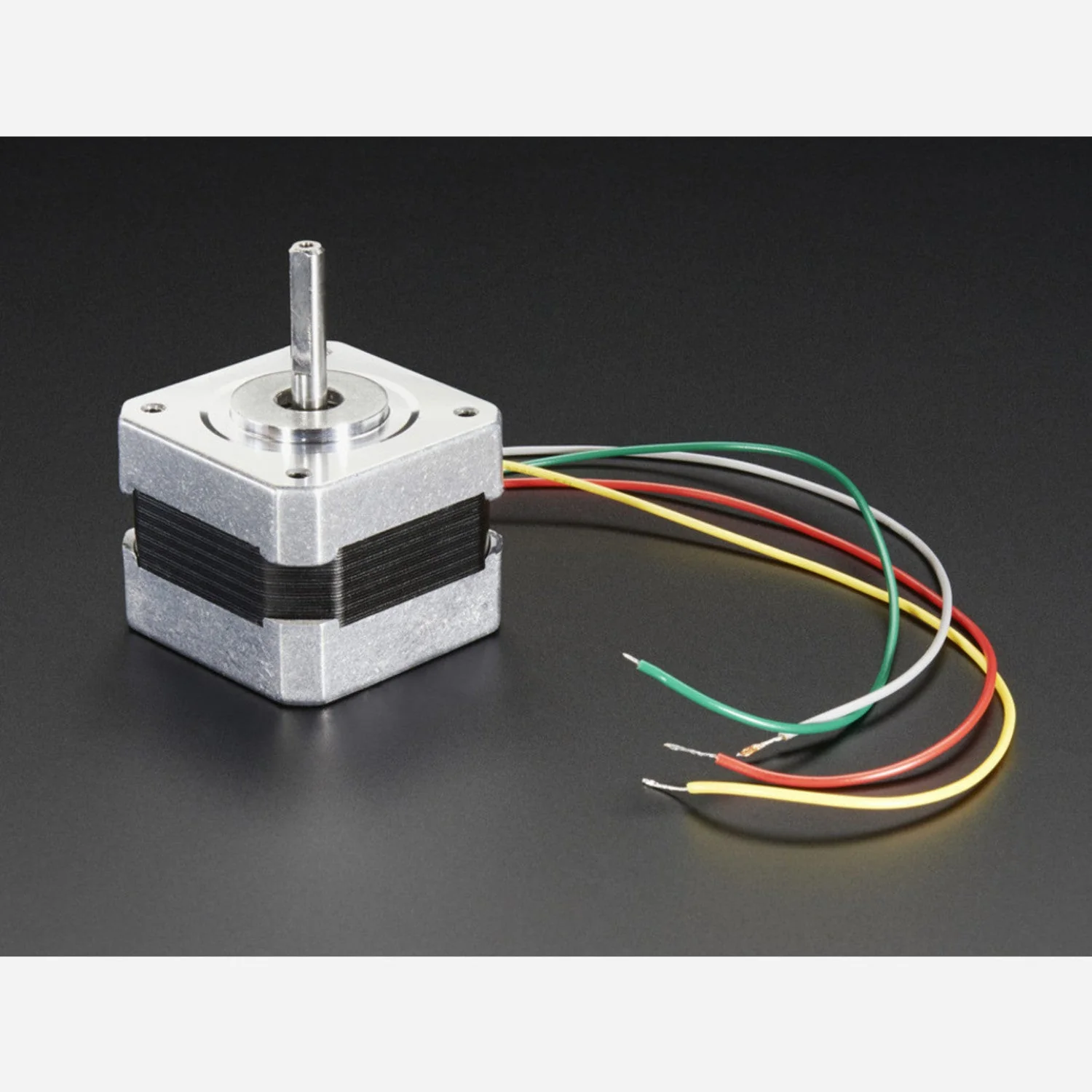
The motor has a cylindrical form factor just under 25mm in diameter, with a 4mm D-shaped output shaft extending 12.5mm from the gearbox face plate. Six colour-coded leads (20cm) terminate in a 1×6 female header with 0.1" pitch for easy connection.
Specifications
- Voltage: 12V
- Gear Ratio: 9.68:1
- No-Load Speed: 580 RPM
- No-Load Current: 60mA
- Stall Current: 0.9A
- Stall Torque: 1.3 kg·cm (18 oz·in) — theoretical extrapolation
- Max Power: 1.8W
- Output Shaft: 4mm D-shaft, 12.5mm length
- Motor Diameter: ~25mm (cylindrical)
- Lead Length: 20cm with 1×6 female header (0.1" pitch)
Encoder Specifications
- Type: Two-channel Hall effect quadrature encoder
- Resolution: 48 CPR (motor shaft) / 464.64 CPR (gearbox output)
- Encoder Vcc: 3.5–20V, max 10mA
- Output: Square waves (A and B channels, ~90° phase offset)
Ideal For
- Closed-loop speed and position control in robotics
- Wheeled robot drive systems with odometry
- Precision motorised mechanisms
Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
This 12V brushed DC gearmotor features a 9.68:1 metal spur gearbox and an integrated 48 CPR quadrature encoder on the motor shaft, providing 464.64 counts per revolution of the gearbox output. The two-channel Hall effect encoder senses a magnetic disk on the motor shaft, delivering speed and direction feedback for precise closed-loop control.
The motor has a cylindrical form factor just under 25mm in diameter, with a 4mm D-shaped output shaft extending 12.5mm from the gearbox face plate. Six colour-coded leads (20cm) terminate in a 1×6 female header with 0.1" pitch for easy connection.
Specifications
- Voltage: 12V
- Gear Ratio: 9.68:1
- No-Load Speed: 580 RPM
- No-Load Current: 60mA
- Stall Current: 0.9A
- Stall Torque: 1.3 kg·cm (18 oz·in) — theoretical extrapolation
- Max Power: 1.8W
- Output Shaft: 4mm D-shaft, 12.5mm length
- Motor Diameter: ~25mm (cylindrical)
- Lead Length: 20cm with 1×6 female header (0.1" pitch)
Encoder Specifications
- Type: Two-channel Hall effect quadrature encoder
- Resolution: 48 CPR (motor shaft) / 464.64 CPR (gearbox output)
- Encoder Vcc: 3.5–20V, max 10mA
- Output: Square waves (A and B channels, ~90° phase offset)
Ideal For
- Closed-loop speed and position control in robotics
- Wheeled robot drive systems with odometry
- Precision motorised mechanisms