N20 DC Motor with Magnetic Encoder - 6V with 1:50 Gear Ratio
This N20 micro geared DC motor includes a built-in magnetic encoder wheel and two Hall effect sensors, providing speed and direction feedback without additional wiring. The compact N20 form factor makes it well suited for small robotics projects requiring precise motor control.
The motor runs on 4.5–6 V DC (6 V nominal) via the white and red wires, which connect to an H-bridge motor driver for PWM speed and direction control. The encoder outputs on the yellow and green wires provide 14 counts per revolution (before gear ratio), allowing your microcontroller to calculate speed and direction via interrupts.
Key Features
- Built-In Magnetic Encoder – Magnetic wheel and two Hall effect sensors pre-attached
- Speed and Direction Sensing – Dual encoder outputs for quadrature decoding
- 1:50 Gear Ratio – High torque at reduced speed
- N20 Form Factor – Compact standard size for small robots
- 14 Counts Per Revolution – Before gear ratio multiplication
Specifications
- Motor Voltage – 4.5–6 V DC (6 V nominal)
- Gear Ratio – 1:50
- No-Load Current – ~100 mA
- Stall Current – ~200 mA
- Encoder Resolution – 14 counts per revolution
- Encoder Power – 3–5 V DC (match your microcontroller logic level)
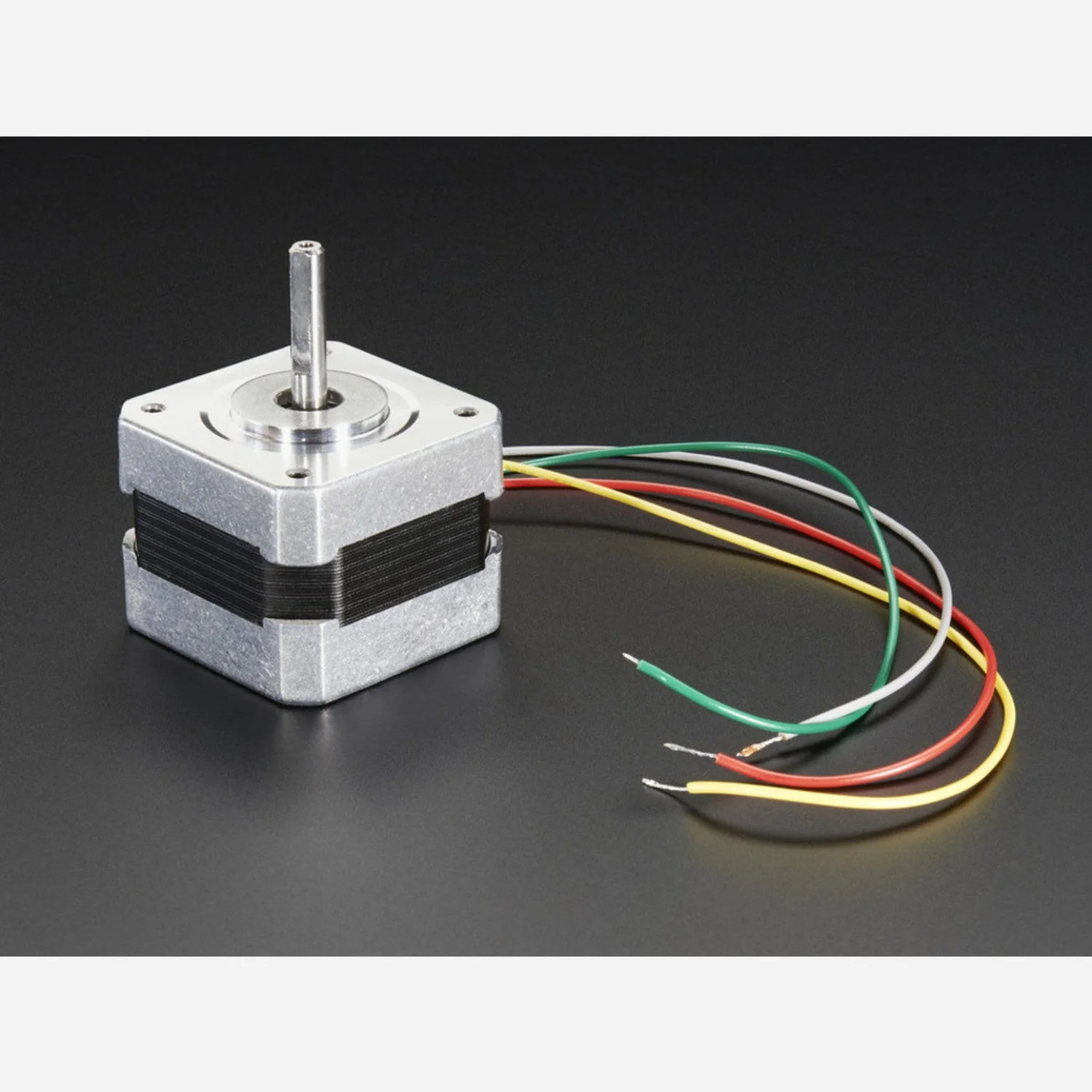
Wiring
- White + Red – Motor power (connect to H-bridge driver)
- Blue – Encoder ground
- Black – Encoder power (3–5 V DC)
- Yellow + Green – Hall effect encoder outputs
Package Contents
- 1× N20 DC motor with magnetic encoder (1:50 gear ratio)
Resources
Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
This N20 micro geared DC motor includes a built-in magnetic encoder wheel and two Hall effect sensors, providing speed and direction feedback without additional wiring. The compact N20 form factor makes it well suited for small robotics projects requiring precise motor control.
The motor runs on 4.5–6 V DC (6 V nominal) via the white and red wires, which connect to an H-bridge motor driver for PWM speed and direction control. The encoder outputs on the yellow and green wires provide 14 counts per revolution (before gear ratio), allowing your microcontroller to calculate speed and direction via interrupts.
Key Features
- Built-In Magnetic Encoder – Magnetic wheel and two Hall effect sensors pre-attached
- Speed and Direction Sensing – Dual encoder outputs for quadrature decoding
- 1:50 Gear Ratio – High torque at reduced speed
- N20 Form Factor – Compact standard size for small robots
- 14 Counts Per Revolution – Before gear ratio multiplication
Specifications
- Motor Voltage – 4.5–6 V DC (6 V nominal)
- Gear Ratio – 1:50
- No-Load Current – ~100 mA
- Stall Current – ~200 mA
- Encoder Resolution – 14 counts per revolution
- Encoder Power – 3–5 V DC (match your microcontroller logic level)
Wiring
- White + Red – Motor power (connect to H-bridge driver)
- Blue – Encoder ground
- Black – Encoder power (3–5 V DC)
- Yellow + Green – Hall effect encoder outputs
Package Contents
- 1× N20 DC motor with magnetic encoder (1:50 gear ratio)