
SparkFun GPS-RTK Dead Reckoning pHAT for Raspberry Pi
The SparkFun GPS-RTK Dead Reckoning pHAT brings high-precision GNSS positioning with automotive dead reckoning to the Raspberry Pi. Built around the u-blox ZED-F9R module, it fuses GNSS measurements with an integrated 3D IMU (accelerometer and gyroscope), wheel ticks, and a vehicle dynamics model to maintain accurate positioning even under poor signal conditions.
The 184-channel ZED-F9R receives GPS, GLONASS, Galileo, and BeiDou signals on L1 and L2 bands, achieving 10 mm horizontal accuracy with RTK corrections. Position updates run at up to 30 Hz, and dead reckoning maintains continuous positioning through tunnels, parking garages, and urban canyons where satellite signals are blocked or degraded.
Pre-soldered headers allow the pHAT to stack directly onto a Raspberry Pi or any single-board computer with a 2×20 GPIO header (including NVIDIA Jetson Nano and Google Coral). Communication uses the Pi's serial UART by default. A Qwiic (I²C) connector and additional 2.54 mm breakout pins are also available.
Key Features
- u-blox ZED-F9R Module – 184-channel multi-constellation GNSS receiver with integrated 3D IMU for dead reckoning
- 10 mm RTK Accuracy – Centimetre-level horizontal positioning with correction data (rover only; requires base station)
- Dead Reckoning – Continuous positioning through signal loss using sensor fusion
- 30 Hz Navigation Rate – High-rate position updates for real-time applications
- Dual-Band Reception – L1C/A and L2C for improved accuracy and faster convergence
- Pre-Soldered Headers – No soldering required; stacks directly onto the Pi GPIO header
- Onboard RTC Battery – Reduces time-to-first-fix from ~24 s (cold) to ~2 s (hot start)
- U.FL Antenna Connector – Use with an external active GNSS antenna
- Qwiic Connector – I²C interface for additional peripherals
Specifications
- Constellations – GPS, GLONASS, Galileo, BeiDou (concurrent)
- Horizontal Accuracy – 10 mm with RTK
- Velocity Accuracy – 0.5 m/s
- Heading Accuracy – 0.2°
- Time Pulse Accuracy – 30 ns
- Max Navigation Rate – 30 Hz
- Operational Limits – ≤ 4 G, 80 km altitude, 500 m/s velocity
- Protocols – NMEA, UBX, and RTCM over UART
- Voltage – 5 V or 3.3 V (all logic is 3.3 V)
- Current Draw – ~85–130 mA (varies with constellation tracking)
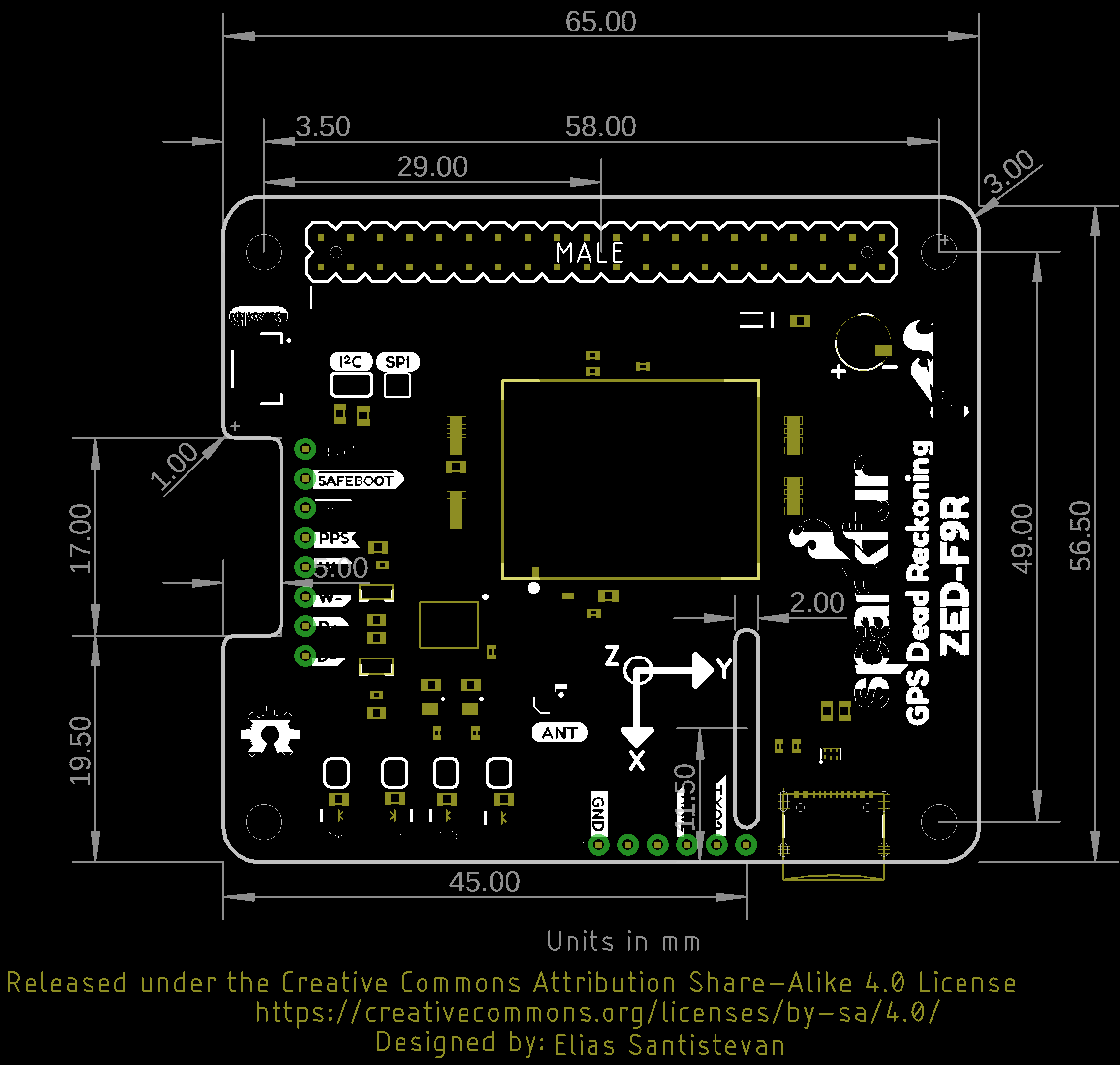
- Board Dimensions – 65.0 × 56.5 mm
- Weight – 20.7 g
Software Features
- Configurable via u-blox u-center (Windows)
- Geofencing, odometer, and spoofing detection
- External interrupt and pin control
- Low power mode
Ideal For
- Autonomous robotics and vehicle navigation
- Precision positioning in urban environments
- Fleet tracking with dead reckoning through tunnels and covered areas
- Raspberry Pi-based GNSS data logging
Package Contents
- 1× SparkFun GPS-RTK Dead Reckoning pHAT (v1.1)
Resources
Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
The SparkFun GPS-RTK Dead Reckoning pHAT brings high-precision GNSS positioning with automotive dead reckoning to the Raspberry Pi. Built around the u-blox ZED-F9R module, it fuses GNSS measurements with an integrated 3D IMU (accelerometer and gyroscope), wheel ticks, and a vehicle dynamics model to maintain accurate positioning even under poor signal conditions.
The 184-channel ZED-F9R receives GPS, GLONASS, Galileo, and BeiDou signals on L1 and L2 bands, achieving 10 mm horizontal accuracy with RTK corrections. Position updates run at up to 30 Hz, and dead reckoning maintains continuous positioning through tunnels, parking garages, and urban canyons where satellite signals are blocked or degraded.
Pre-soldered headers allow the pHAT to stack directly onto a Raspberry Pi or any single-board computer with a 2×20 GPIO header (including NVIDIA Jetson Nano and Google Coral). Communication uses the Pi's serial UART by default. A Qwiic (I²C) connector and additional 2.54 mm breakout pins are also available.
Key Features
- u-blox ZED-F9R Module – 184-channel multi-constellation GNSS receiver with integrated 3D IMU for dead reckoning
- 10 mm RTK Accuracy – Centimetre-level horizontal positioning with correction data (rover only; requires base station)
- Dead Reckoning – Continuous positioning through signal loss using sensor fusion
- 30 Hz Navigation Rate – High-rate position updates for real-time applications
- Dual-Band Reception – L1C/A and L2C for improved accuracy and faster convergence
- Pre-Soldered Headers – No soldering required; stacks directly onto the Pi GPIO header
- Onboard RTC Battery – Reduces time-to-first-fix from ~24 s (cold) to ~2 s (hot start)
- U.FL Antenna Connector – Use with an external active GNSS antenna
- Qwiic Connector – I²C interface for additional peripherals
Specifications
- Constellations – GPS, GLONASS, Galileo, BeiDou (concurrent)
- Horizontal Accuracy – 10 mm with RTK
- Velocity Accuracy – 0.5 m/s
- Heading Accuracy – 0.2°
- Time Pulse Accuracy – 30 ns
- Max Navigation Rate – 30 Hz
- Operational Limits – ≤ 4 G, 80 km altitude, 500 m/s velocity
- Protocols – NMEA, UBX, and RTCM over UART
- Voltage – 5 V or 3.3 V (all logic is 3.3 V)
- Current Draw – ~85–130 mA (varies with constellation tracking)
- Board Dimensions – 65.0 × 56.5 mm
- Weight – 20.7 g
Software Features
- Configurable via u-blox u-center (Windows)
- Geofencing, odometer, and spoofing detection
- External interrupt and pin control
- Low power mode
Ideal For
- Autonomous robotics and vehicle navigation
- Precision positioning in urban environments
- Fleet tracking with dead reckoning through tunnels and covered areas
- Raspberry Pi-based GNSS data logging
Package Contents
- 1× SparkFun GPS-RTK Dead Reckoning pHAT (v1.1)





















{kind=link}