SparkFun RedBot Sensor - Mechanical Bumper
The SparkFun RedBot Mechanical Bumper is a collision-detection sensor that uses a spring-steel "whisker" to detect obstacles before your robot makes contact. When the whisker bumps into an object, it closes a simple SPST switch connection, triggering a response such as stopping the motors.
The sensor connects to the RedBot Mainboard via a 3-pin header using female-to-female jumper wires. Use the included RedBot library for easy integration into your collision-avoidance code.
Key Features
- Whisker-Style Detection – Spring-steel whisker detects obstacles before the robot body makes contact
- SPST Switch Operation – Simple normally-open switch closes on contact
- 3-Pin Header – Connects directly to RedBot Mainboard with jumper wires
- Compact Size – 26.27 × 17.67 mm (1.03 × 0.69″)
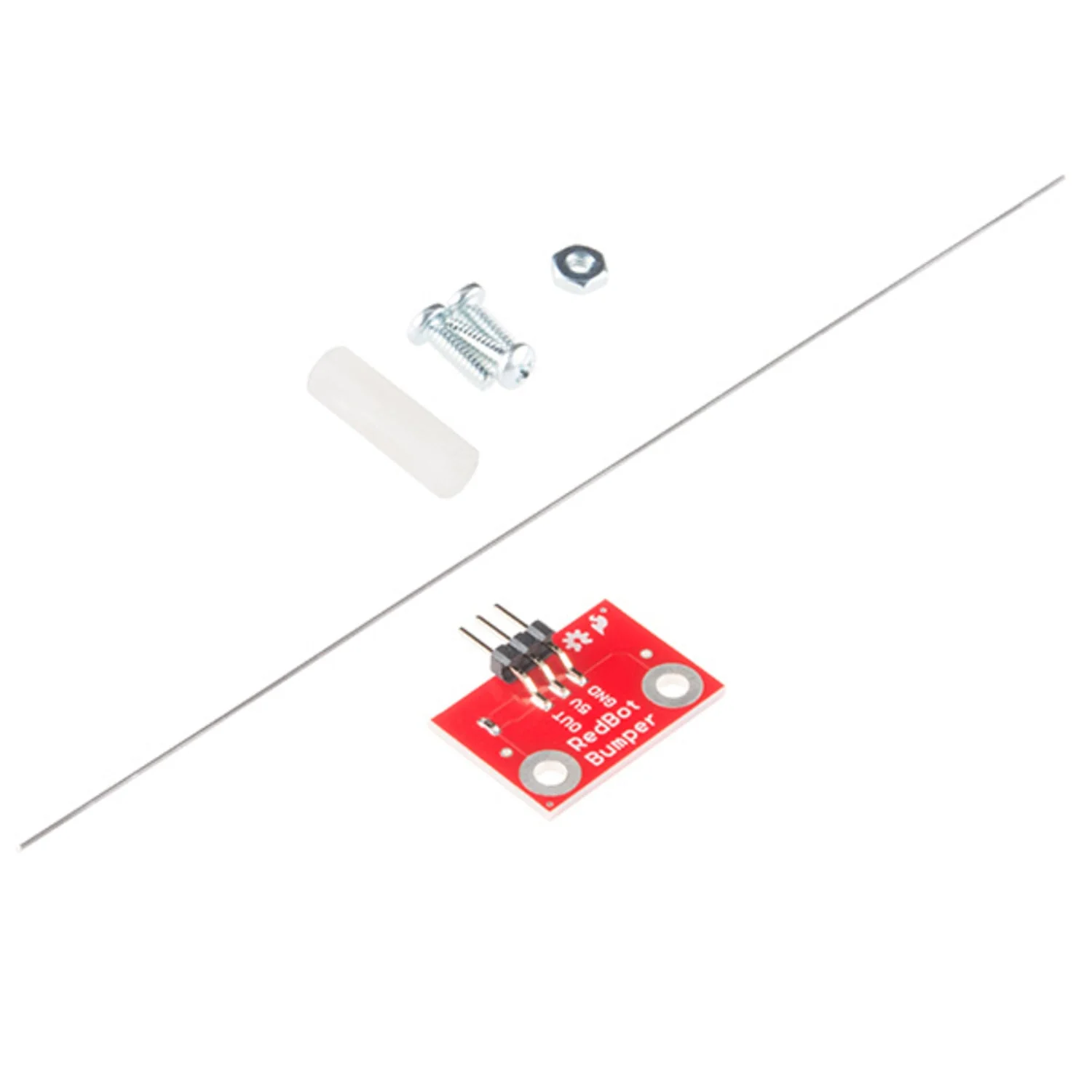
Package Contents
- 1× Mechanical Bumper Board
- 1× Whisker
- 1× ¾″ 4-40 Nylon Standoff
- 1× 4-40 Hex Nut
- 3× ⅜″ 4-40 Phillips Machine Screw
Resources
Original: $12.78
-70%$12.78
$3.83Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
The SparkFun RedBot Mechanical Bumper is a collision-detection sensor that uses a spring-steel "whisker" to detect obstacles before your robot makes contact. When the whisker bumps into an object, it closes a simple SPST switch connection, triggering a response such as stopping the motors.
The sensor connects to the RedBot Mainboard via a 3-pin header using female-to-female jumper wires. Use the included RedBot library for easy integration into your collision-avoidance code.
Key Features
- Whisker-Style Detection – Spring-steel whisker detects obstacles before the robot body makes contact
- SPST Switch Operation – Simple normally-open switch closes on contact
- 3-Pin Header – Connects directly to RedBot Mainboard with jumper wires
- Compact Size – 26.27 × 17.67 mm (1.03 × 0.69″)
Package Contents
- 1× Mechanical Bumper Board
- 1× Whisker
- 1× ¾″ 4-40 Nylon Standoff
- 1× 4-40 Hex Nut
- 3× ⅜″ 4-40 Phillips Machine Screw