N20 DC Motor with Magnetic Encoder - 6V with 1:298 Gear Ratio
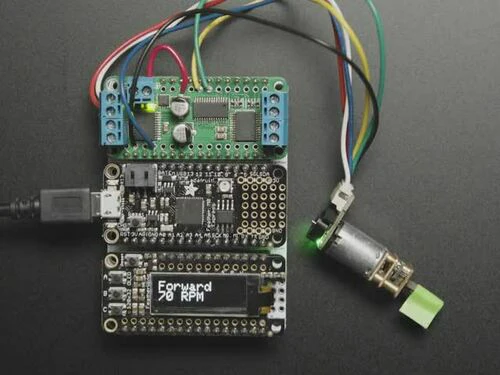
This N20 micro DC gearmotor includes a built-in magnetic encoder with two Hall effect sensors, providing both speed and direction feedback without additional wiring. The compact N20 form factor makes it ideal for small robotics projects where precise motor control is needed.
The magnetic encoder wheel and dual Hall effect sensors are pre-assembled, outputting quadrature signals on two wires for easy interfacing with a microcontroller. Simply count interrupts on the encoder pins — with 14 counts per revolution multiplied by the gear ratio — to calculate RPM and direction.
Key Features
- Built-in Magnetic Encoder – Pre-attached magnetic wheel with two Hall effect sensors for speed and direction sensing
- 1:298 Gear Ratio – High torque output at reduced speed
- 14 Counts Per Revolution – Quadrature output for precise position and speed measurement
- N20 Form Factor – Compact standard size for small robotics builds
- H-Bridge Compatible – PWM-capable for speed and direction control
Wiring
- White + Red: Motor power (connect to motor driver / H-bridge)
- Black: Encoder ground (connect to microcontroller GND)
- Blue: Encoder power (3–5 V DC)
- Yellow + Green: Hall effect encoder outputs (connect to microcontroller interrupt pins)
Specifications
- Motor Voltage: 4.5–6 V DC (6 V nominal)
- Gear Ratio: 1:298
- No-Load Current: ~100 mA
- Stall Current: ~200 mA
- Encoder Resolution: 14 counts per revolution
- Encoder Voltage: 3–5 V DC
Ideal For
- Small robotics projects requiring precise motor control
- Closed-loop speed and position control systems
- Educational robotics and encoder learning
Resources
Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
This N20 micro DC gearmotor includes a built-in magnetic encoder with two Hall effect sensors, providing both speed and direction feedback without additional wiring. The compact N20 form factor makes it ideal for small robotics projects where precise motor control is needed.
The magnetic encoder wheel and dual Hall effect sensors are pre-assembled, outputting quadrature signals on two wires for easy interfacing with a microcontroller. Simply count interrupts on the encoder pins — with 14 counts per revolution multiplied by the gear ratio — to calculate RPM and direction.
Key Features
- Built-in Magnetic Encoder – Pre-attached magnetic wheel with two Hall effect sensors for speed and direction sensing
- 1:298 Gear Ratio – High torque output at reduced speed
- 14 Counts Per Revolution – Quadrature output for precise position and speed measurement
- N20 Form Factor – Compact standard size for small robotics builds
- H-Bridge Compatible – PWM-capable for speed and direction control
Wiring
- White + Red: Motor power (connect to motor driver / H-bridge)
- Black: Encoder ground (connect to microcontroller GND)
- Blue: Encoder power (3–5 V DC)
- Yellow + Green: Hall effect encoder outputs (connect to microcontroller interrupt pins)
Specifications
- Motor Voltage: 4.5–6 V DC (6 V nominal)
- Gear Ratio: 1:298
- No-Load Current: ~100 mA
- Stall Current: ~200 mA
- Encoder Resolution: 14 counts per revolution
- Encoder Voltage: 3–5 V DC
Ideal For
- Small robotics projects requiring precise motor control
- Closed-loop speed and position control systems
- Educational robotics and encoder learning